基于NE555的魚缸自動水位控制電路設計與分析
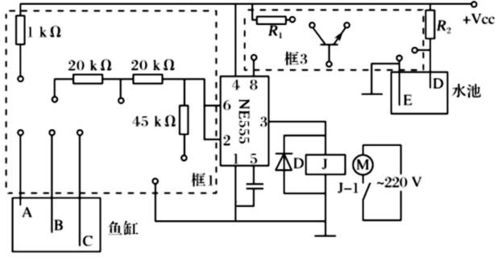
在觀賞魚養(yǎng)殖或家庭水族箱管理中,維持水位的穩(wěn)定至關重要。水位過低不僅影響觀賞效果,更可能危及魚類生存。本文基于NE555時基集成電路,設計一種簡單、可靠、低成本的魚缸水位自動控制裝置,其核心目標是:當水位低于預設的下限(如圖1中的b點)時,自動啟動電動機抽水;水位恢復到安全范圍后,自動停止抽水。
一、 系統(tǒng)工作原理與NE555功能概述
整個控制系統(tǒng)的核心是NE555集成電路。NE555是一種極富盛名且應用廣泛的模擬-數(shù)字混合集成定時器芯片。根據(jù)圖1中提供的輸入輸出關系表,我們可以將其在本次設計中的工作模式理解為一種施密特觸發(fā)器(雙穩(wěn)態(tài)模式) 或由外部傳感器觸發(fā)的單穩(wěn)態(tài)模式的變體應用。其核心特性是:輸出狀態(tài)(高電平或低電平)由特定引腳(如觸發(fā)引腳TRIG和閾值引腳THRES)的電壓與內部參考電壓的比較結果決定,具有滯回特性,可以有效防止水位在臨界點附近波動時電機的頻繁啟停(即“抖動”)。
在本設計中,我們將水位探測點(如圖1中的a點和b點)作為傳感器。通常,a點設置為水位上限探測點,b點設置為水位下限探測點。水位本身作為可變電阻或開關使用:當水位淹沒電極時,電極間通過水導電,電阻很小;當水位離開電極時,電極間開路,電阻極大。
二、 電路設計思路與連接方案
- 水位傳感部分:
- 使用三根導電探針(或金屬電極)垂直插入魚缸。一根公共端(例如接電源Vcc),另外兩根分別對應高位點a和低位點b。
- b點是控制關鍵。當水位高于b點時,b點探針與公共端通過水導通,使連接b點的電路節(jié)點(通常連接到NE555的觸發(fā)引腳,如第2腳)處于一個特定的電平(例如高電平)。
- 當水位低于b點時,b點探針與公共端之間斷開,該節(jié)點電平被上拉或下拉電阻改變(例如變?yōu)榈碗娖剑_@個電平變化將作為NE555的觸發(fā)信號。
- NE555核心控制部分:
- 將NE555配置為單穩(wěn)態(tài)模式或一種特定的比較器模式。這里更常用的是利用其觸發(fā)引腳(2)和復位引腳(4)。
- 設計要點:
- 觸發(fā)條件:水位低于b點 → b點電極斷開 → 觸發(fā)引腳(2)電壓降至低于(1/3)Vcc → 符合觸發(fā)條件。
- 輸出動作:一旦觸發(fā),NE555輸出引腳(3)立即從低電平跳變?yōu)楦唠娖剑⒕S持一段時間(由外部RC電路決定,或在本水位控制中,我們希望維持到水位恢復,因此需要結合a點進行復位)。
- 復位/停止條件:輸出高電平驅動繼電器或晶體管,使電動機開始抽水。水位隨之上升。當水位淹沒a點時,a點電極導通,可以將一個信號(例如高電平)送至NE555的復位引腳(4)。當復位引腳(4)收到有效信號(低電平有效復位時接低電平,高電平有效時接高電平,需根據(jù)電路設計),NE555輸出立即復位為低電平,電動機停止工作。
- 另一種更優(yōu)的設計是使用雙探頭(b點和公共端)結合NE555的施密特觸發(fā)器特性。將b點信號送至觸發(fā)端。當水位低于b,觸發(fā)輸出高電平驅動電機;當水位上升,雖然重新淹沒b點,但由于施密特觸發(fā)器的滯回特性,輸出不會立即改變,直到水位上升到遠高于b點(由另一個電阻分壓點設定,替代了物理a點)或通過一個延時電路后才停止,這樣可以確保每次補水都有足夠的量,避免電機短時間循環(huán)啟停。
- 執(zhí)行機構部分:
- NE555的輸出引腳(3)驅動能力有限(約200mA),不能直接驅動大功率水泵電機。
- 需要使用一個晶體管(如NPN型三極管) 或繼電器模塊作為驅動開關。當NE555輸出高電平時,晶體管飽和導通或繼電器吸合,使水泵電機通電工作;輸出低電平時,晶體管截止或繼電器釋放,電機斷電停止。
- 必須注意:在與交流市電驅動的水泵連接時,務必使用繼電器進行電氣隔離,確保控制電路的安全。
三、 集成電路設計
基于NE555的魚缸水位自動控制電路設計,巧妙地將水位變化轉化為電信號,利用NE555穩(wěn)定的觸發(fā)與復位功能,控制執(zhí)行機構的通斷。其核心邏輯映射如下:
- 輸入狀態(tài)(水位低于b點):觸發(fā) → 輸出動作(OUT=High):電機運行。
- 復位條件(水位達到a點):復位 → 輸出動作(OUT=Low):電機停止。
這種設計結構簡單、成本低廉、抗干擾能力較強(得益于NE555的滯回特性),非常適合家庭或小型魚缸的水位自動維護。在實際制作中,需要仔細調整探測電極的位置、上拉/下拉電阻的阻值以及可能用到的RC定時參數(shù),以確保系統(tǒng)穩(wěn)定可靠地運行。
如若轉載,請注明出處:http://www.51major.com.cn/product/48.html
更新時間:2026-01-07 02:05:56